使用快速返回机制设计和制造滑轮
抽象的:
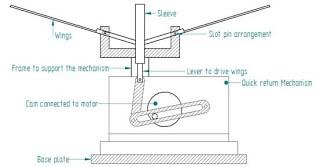
这项工作旨在提出一种新颖的快速返回机制设计,新机构由广义的旧式耦合和滑块曲柄机构组成。首先,通过研究影响时间比的运动尺寸
建议设计的几何。通过转换成其运动学上等同的机制,然后导出时间比的设计方程。此外,给出了一个设计示例的例证。此外,设计通过使用运动仿真验证
亚当斯软件。最后,建立了原型和实验设置,并进行了实验。结果表明,建议的新机制是可行的,精度合理。此外,它更紧凑,更易于平衡
动态比传统的快速返回联动。
快速返回(QR)机制具有不同的输入持续时间,可为其工作和返回笔划。QR机构的时间比(Tr)是在返回行程期间改变工作行程期间输入位移的变化与其变化之比。几种基本类型的机制具有QR动作。这些类型包括滑块曲柄和四个条机构。在机制理论的第一课程中,QR机制设计项目已被发现有效地将学生暴露于机制设计和分析的概念。
本文评论基本QR机制,提出了项目问题和解决方案示例,并讨论了在机制理论课程中包含此类项目问题的价值。
介绍
快速返回机制是一种机制,其以不同的两个笔划以不同的速率将旋转运动转换成往复运动。当工作行程所需的时间大于返回笔划的时间时,它是一种快速返回机制。它产生了重要的
改善加工生产率。目前,它广泛用于机床,例如,成型机,动力驱动的锯和需要具有密集负载的工作行程的其他应用,以及具有非密集负载的返回行程。可以在文献中找到几种快速回报机制,包括偏移曲柄滑块机构,曲柄覆盖机构,双曲柄机构和白曲机制。
所有这些都是联系。连锁有其优势和缺点。制造和易于润滑是便宜的;然而,它庞大而且难以平衡。在情况下,如果紧凑的空间对设计是必不可少的,那么连锁可能不是一个不错的选择。
因此,如何查找快速返回机制的新替代方案是一个值得审查的开放主题。有许多学者致力于快速回报机制的研究,已经取得了许多有价值的贡献。

参考/研究文件下载:
https://acadpubl.eu/jsi/2017-116-13-22/articles/14/48.pdf.