AGV(自动导向车辆)简介
随着自动化机械技术的发展,制造系统中的物料搬运变得越来越容易。一种材料处理方法,已广泛应用于大多数工业现在一天
是自动导向车辆系统,或者更广为人知的AGVS。它已经成为材料处理行业中增长最快的设备类别之一(Tanchoco和Bilge, 1997)。直到今天,许多研究人员都对改进该系统表现出了兴趣,以便在制造环境中实现更高的生产率和灵活性。根据(Groover, 1987),自动导向车辆系统(AGVS)是一种材料搬运系统,它使用独立操作的、自行推进的车辆
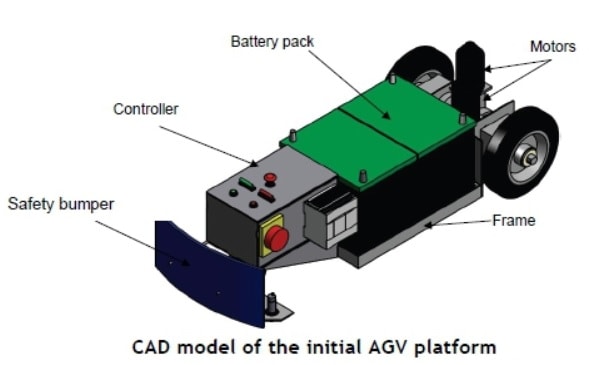
作为自动导航车辆或AGV,在交付点或站点之间沿着规定的路径移动。一辆典型的AGV将由车架、电池、电气系统、驱动单元、转向、车载控制器和工作平台组成。
是自动导向车辆系统,或者更广为人知的AGVS。它已经成为材料处理行业中增长最快的设备类别之一(Tanchoco和Bilge, 1997)。直到今天,许多研究人员都对改进该系统表现出了兴趣,以便在制造环境中实现更高的生产率和灵活性。根据(Groover, 1987),自动导向车辆系统(AGVS)是一种材料搬运系统,它使用独立操作的、自行推进的车辆
作为自动导航车辆或AGV,在交付点或站点之间沿着规定的路径移动。一辆典型的AGV将由车架、电池、电气系统、驱动单元、转向、车载控制器和工作平台组成。

自主移动小车的分类
现代AGV系统不同于经典的AGV系统。与使用固定路径不同,许多现代AGV采用了测距技术,这意味着车辆的路径是经过编程的,当增加新的站点甚至流量时,可以相对容易地改变。与过去由中央控制器进行控制相比,现代技术也允许车辆自行做出决定。这将导致
自适应、自学习AGV系统(Tuan Le-Anh and De Koster)。在本节中,将描述根据Peters et a1的期刊所述的AGVS。根据该期刊,自动导航车辆系统可分为以下三个基本层次:
自适应、自学习AGV系统(Tuan Le-Anh and De Koster)。在本节中,将描述根据Peters et a1的期刊所述的AGVS。根据该期刊,自动导航车辆系统可分为以下三个基本层次:

1.1.导向槽的决心
)静态路径
我。单向
2双向
b)动态路径
2.
汽车的能力
a)单机负荷
b)多个负载
·3.
汽车解决机制
)直接地址
b)间接地址
现代自主移动小车特性
现代自主移动小车特性
- 现代agv是计算机控制的车辆,带有车载微处理器。
- 位置反馈系统以修正路径
- 通过系统控制器实现车辆之间的通信
- 电脑系统管理
- 优化AGV的使用
- 跟踪运输中的物料,指导AGV的运输。
类型的AGVSs
- 自主移动小车牵引车
- AGVS单元装载载体
- 自主移动小车托盘卡车
- 自主移动小车叉车
- 自主移动小车空载转运蛋白
- 自主移动小车流水线车辆
agv导航系统
- AGVS导航系统的目标是使AGV保持在预定的路径上
- AGV的一个主要优点是,与传送带、链条等相比,它的制导系统易于修改,可以以较低的成本改变导向路径。
- 另一个好处是:引导路径是灵活的,这意味着路径的交叉是可能的。
- 一般情况下,导路不会阻碍其他系统。
- 制导系统的选择可以根据AGV的类型、应用、要求和环境限制等因素进行。

- 有线制导,一根通电的导线沿着引导路径扎根。AGV的天线跟随根线。
- 光- - - - - -在混凝土/瓷砖地板上涂上无色的荧光颗粒。光传感器被用来跟踪这些粒子。
- 惯性,在固定在AGV上的微处理器上对引导路径进行编程。声纳系统用于发现障碍物。
- 红外,红外光发射器用于检测车辆的位置。在车顶安装了反射镜以反射光线。
- 激光-激光束用于扫描壁挂式条码反射器。可以获得精确的定位
- 教学类型,AGV通过移动所需的路径来学习引导路径。向主机发送信息
自主移动小车的路由
- 路径系统用于选择车辆的最优路径。
- 网络控制器给出目的地,车载控制器则导航车辆。
- 常用方法:
- 频率选择方法
- Path-switch选择方法







你好。http://jakshgy773733.us