表的内容
空间机器人研讨会-报告免费下载
空间机器人导论:
机器人是一个以计算机为大脑,以机械为主体的系统。将传感器和执行器集成到机械机身中,通过计算机软件实现运动,以执行所需的任务。机器人在执行新任务或执行复杂运动序列的能力方面比其他类别的机器人更灵活
自动化生产设备。今天,人们对这一领域产生了浓厚的兴趣,一个独立的技术分支“机器人技术”已经出现。它涉及到机器人设计、开发和应用的所有问题。替代或资助载人航天活动的技术被称为空间机器人技术。空间机器人的各种应用包括对有缺陷的卫星的检查、修复,或空间站的建设、为空间站提供物资和回收等。随着运动学、动力学和控制的知识和基础技术的进步,设计和开发先进的机器人系统将成为可能。这将打开探索和体验宇宙的大门,并为我们的生活方式带来无数美好的改变。
自动化生产设备。今天,人们对这一领域产生了浓厚的兴趣,一个独立的技术分支“机器人技术”已经出现。它涉及到机器人设计、开发和应用的所有问题。替代或资助载人航天活动的技术被称为空间机器人技术。空间机器人的各种应用包括对有缺陷的卫星的检查、修复,或空间站的建设、为空间站提供物资和回收等。随着运动学、动力学和控制的知识和基础技术的进步,设计和开发先进的机器人系统将成为可能。这将打开探索和体验宇宙的大门,并为我们的生活方式带来无数美好的改变。
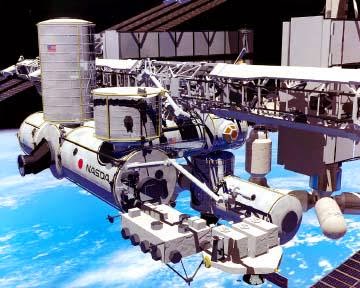
空间机器人的结构
空间机器人的结构描述
该机器人为6自由度铰接式机器人。使用6自由度系统而不是自由度较少的系统的原因是,不可能将所有关于载荷/机架可能操作的信息冻结在3D空间中,从而排除机器人的一些自由度。因此,首选多功能机器人,因为这不会对实验室载荷/机架的设计施加任何限制,并提供机器人操作的灵活性。一个超过六自由度的系统可以提供冗余,可以用来克服障碍。然而,这种配置的分析和控制的复杂性是多重的。
机器人由两个手臂组成,即上臂和下臂。上臂固定在底座上,并具有围绕俯仰和偏航轴的旋转自由度。所述下臂通过围绕俯仰轴的旋转关节与所述上臂连接。这3个自由度使末端执行器可以定位在工作空间中任何需要的点。在较低的手臂的末端有一个三卷手腕机构,用于使末端执行器围绕任何轴进行定向。连接手腕的末端执行器执行手所需的功能。电机通过驱动电路驱动手臂和手腕的关节。每个关节的角编码器控制围绕每个轴的运动。末端执行器由马达驱动,手指上的压力传感器/应变计用于控制工作中的抓取力。
描述子系统
机械手臂的主要子系统有
-
关节
-
手臂
-
手腕
-
爪
关节
关节允许机器人的两个连杆之间作相对运动。
关节有两种类型
-
辊联合,旋转轴与完全伸展的手臂轴线相同。
-
Pitchjoint-旋转轴垂直于延伸臂的轴线
因此旋转角度是有限的。
对关节的主要要求是具有接近零隙、高刚度和低摩擦。考虑到手臂在工作空间中所占的体积的限制,关节必须高度紧凑,因此它们被集成到手臂结构中。为了保证关节的高刚度,驱动器、减速齿轮单元和角编码器集成到关节中。
每个关节由
-
煎饼式直流力矩电机(稀土磁体型)在尺寸、重量、响应时间和高转矩惯量比等方面都优于其他类型的电机。
-
谐波齿轮传动用于扭矩放大/减速。这些齿轮传动的齿隙接近于零,可以在一个级获得高的齿轮传动比,具有较高的效率。
-
电磁驱动的摩擦制动器,防止手臂的无意运动。当齿轮传动不是自锁时,这是特别需要的。在没有重力载荷(零重力环境)的空间环境中,制动器有助于提高关节执行器控制系统的稳定性。即,只要关节速度小于阈值,制动器就可以应用。
-
电光角编码器在每个轴上,以感知手臂末端的位置。空间合格的润滑剂如二硫化钼(粘结膜/溅射),铅,金等将用于齿轮传动和球轴承。
机器人手臂
最简单的手臂是拾取和放置类型。这些可以用来组装零件或将其安装到夹具或夹具中。这是可能的,因为在机器人手臂上可以达到很高的精度。取下后,可以牢固地握住零件
这样一来,位置和方向就能准确地知道手臂的位置和方向。机器人手臂可以操纵形状复杂、本质脆弱的物体。
这样一来,位置和方向就能准确地知道手臂的位置和方向。机器人手臂可以操纵形状复杂、本质脆弱的物体。
手腕
机器人手臂由抓手和手腕组成。手腕附着在机器人手臂上,有三个自由度(俯仰、偏航和滚转)。手腕具有响应力和力矩而变形并恢复平衡的能力
移去偏转力后定位。
移去偏转力后定位。
爪
夹持器附着在机械手的手腕上,以完成所需的任务。它的设计取决于被握住的零件的形状和尺寸。
结论
在未来,机器人将使数十亿人有可能拥有休闲的生活,而不是目前的专注于物质需求。现在有数亿人对太空着迷,但却没有办法去探索它。对他们来说,太空机器人将打开探索和体验宇宙的大门。







