如何计算机制的自由度|Grubler的规则
什么是自由度(DOF):
它是描述空间中身体位置所需的独立坐标的数量。空间的自由体可以有六个自由度。即,沿X,Y和Z轴的线性位置和相对于X,Y和Z轴的旋转/角位置。
在运动对中,根据对运动施加的约束,链路可能失去六个自由度中的一些。

可能的运动:
1.沿X,Y和Z轴三次翻译。
2.关于x,y和z轴的三个旋转。
所以自由空间中的一个物体有六个自由度。
固定物体具有零自由度。
约束刚体
刚体和运动约束是机制的基本组件。受限制的刚体系统可以是运动链,机构,结构,或者这些结构。运动限制在刚体运动中的影响具有两个内在方面,这是几何和物理方面。换句话说,我们可以分析受约束的刚体与其几何关系的运动或使用牛顿的第二律法。
机构是受约束的刚体系统,其中一个体是框架。当考虑到是一种机制的受约束刚体系统时,自由度很重要。当系统是结构或没有明确的运动时,这不太重要。
计算刚体系统的自由度直截了当。任何无约束的刚体在飞机上有六个空间和三次自由度。在刚体之间增加运动限制将相应地降低刚体系统的自由度。我们将在下一节中的平面机制讨论此主题。
Grubler的规则
机制的自由度/移动性:它是描述机制的所有链路的配置或位置所需的输入(独立坐标的数量),关于任何给定的即时的固定链路。
Grubler的方程式:机制自由度的数量
f = 3(n-1)-2l-h。在哪里,
f =自由度
n =链接数= n2 + n3 + ...... + nj,其中,n2 =二进制链路的数量,n3 =三元链路的数量...等。
L =较低对的数量,通过计算关节的数量而获得。如果在任何时候连接两个以上的链路,则需要考虑每个附加链路的一个额外的下对。
h =更高对的数量
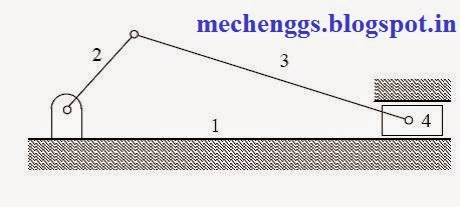
确定平面机制自由度的实例:

f = 3(n-1)-2l-h
这里,n2 = 4,n = 4,l = 4和h = 0。
f = 3(4-1)-2(4)= 1
即,任何一个链路的一个输入将导致所有链接的明确运动。

f = 3(n-1)-2l-h
这里,n2 = 5,n3 = 1,n = 6,l = 7(在2,3和4的交叉点处,要考虑两个下对),H = 0。
f = 3(6-1)-2(7)= 1

f = 3(n-1)-2l-h
这里,n2 = 5,n = 5,l = 5和h = 0。
f = 3(5-1)-2(5)= 2
即,对于任何两个链路的两个输入都必须在所有链接中产生明确的动作。