Table of Contents
Pneumatic Operated Robotic Arm Report Download Mechanical projects
LISTS OF ACTIVITES OF PROJECT
选择该项目选择并通过Pnumetic Control将机器人手臂放置,我们发现了许多项目活动。所有活动列表如下:
- 制定项目的设计。
- 要确定我们项目的哪种材料更好,经济,更容易获得。
- To study about pneumatic system and how use it in our project.
- To do market survey about pneumatic system and which place we get it.
- 通过使用木材作为原料,按照项目设计制作臂。
- As per project design make column by use of wood as raw material.
- To buy pneumatic cylinder as per project design and set it in arm and column.
- 购买所有气动系统控制气动气缸。
- To decide which type of motor use in project to give rotary motions it.
- To buy selected motor and fit in project assembly.
- 将气缸中的气动系统连接在圆柱体中。
- 它与空压机有关。
阅读更多 :
项目工作 -
This project has sample work. Its work is to pick object or work-piece at one site and to place that object or work-piece another site.
在图中显示挑选和放置机器人臂的气动控制。其工作步骤如下:
压缩空气来自压缩机。
2. By using air controlling manual valve air comes in cylinder which is located between column and arm and arm rise up by presser of cylinder’s piston.
3. By using low RPM motor column rotate to object.
4. By losing air in cylinder which one placed in arm opens jaws by using rack and pinion mechanism.
5. Arm become down to object by losing air in cylinder.
6. Object comes between two jaws.
7.通过增加汽缸钳口的压力机关闭和钳口的物体拾取。
8. Arm rise up by column’s cylinder.
9.整个组件在正确的地方通过低RPM电机旋转。
10.Arm become down to place object at right place by using above processes.

PART DETAILS OF PROJECT
在这个项目中,通过使用许多部分。每个部件都有自己的规格和尺寸。在这里,我们将列出每个部分和它的规格。这里还提到每个部分2D和3D绘图。
ARM :-
ARM is main part in this project which cover pick of object mechanism.
COLUMN:-
Column is part of project which support arm to rise or to become down by using column’s pneumatic cylinder. Column also cover pneumatic cylinder which helps arm rise or become down. It is made from wood. Column reset on low RPM motor which gives column rotation motion.
PNEUMATIC CYLINDER:-
This project works on pneumatic cylinder because concept of project is using pneumatic systems we have to pick object and to place object. It is work by compressed air which comes from air compressor.
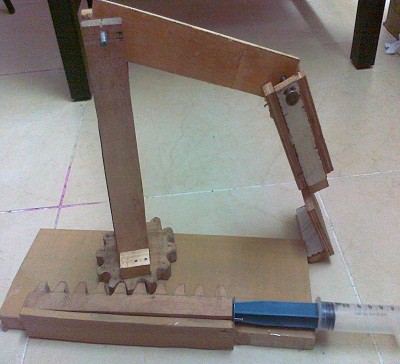
RAKE AND PINION:-
In this project we use rake and pinion as mechanism of pick object.
By this mechanism we can pick object. This mechanism works by help of arm’s cylinder. Air comes in cylinder piston comes out where rake is connected with piston so rake go forward that sway pinion rotate where is two jaws connected with pinion which is becomes close.
CONCLUSION
After completing this project PICK AND PLACE ROBOTIC ARM BY PNEUMATIC CONTROL we know that our project can pick object like bottle, brick and box which weight is not greater than 4 kilograms because in this project we use low RPM motor to give rotation motion project. It is capacity 7 kilograms to take load and project assembly weight 3 kilograms.
在这个项目上工作,从选择的选择到测试的测试是真正的有趣和到期。该练习作为对各种气动系统的大量洞察力提供,选择不同组件的适当材料,并制作或购买决定,特别是为设计该项目。我们研究了如何在各个行业中使用和控制气动系统。
在成功的工作中看到项目我们非常高兴和满意。
Download
Pneumatic Operated Robotic Arm Report pdf Download Mechanical projects
More Resources /articles
设计和制作项目 - 摘要,报告下载
Project Sample report , Final report Download
Best Low Cost Mechanical Projects
产品想法,创新机器创意项目
New Mechanical Projects 2020 ( All Projects Post Index List )
相关文章:
 自主机器人轮椅报告下载机械项目188金宝搏怎么样
自主机器人轮椅报告下载机械项目188金宝搏怎么样
 Pick And Place Robotic Arm Assembly | 3D Printing Technology
Pick And Place Robotic Arm Assembly | 3D Printing Technology
 Mini Diploma Project | FLUID HYDRAULICS OPERATED ROBOTIC ARM
Mini Diploma Project | FLUID HYDRAULICS OPERATED ROBOTIC ARM
 Sorting of Objects Through Pick and Place Robotic arm Report
Sorting of Objects Through Pick and Place Robotic arm Report
 7 Hydraulic Jack Related Mechanical Projects Report Download
7 Hydraulic Jack Related Mechanical Projects Report Download
 手动控制机器人手臂 - 机械项目188金宝搏怎么样
手动控制机器人手臂 - 机械项目188金宝搏怎么样
 Design and Fabrication of Voice Activated Robotic Arm – Mechanical Project
Design and Fabrication of Voice Activated Robotic Arm – Mechanical Project
 Pneumatic Bench Vice Model – Mechanical Project Report Download
Pneumatic Bench Vice Model – Mechanical Project Report Download