目录
通过挑选对象排序并放置机器人武器报告下载
抽象的
本项目涉及自动化物料处理系统。它同步机械手臂的运动,以挑选在传送带上移动的物体。它的目的是通过挑选和放置物体在其各自的预先编程的地方来分类彩色物体。从而消除了人工工作的单调性,实现了工作的准确性和快速性。这个项目涉及彩色传感器,可感应对象颜色并将信号发送到微控制器。微控制器将信号发送到八个继电器电路,该电路驱动机器人臂的各种电机以抓住物体并将其放在指定的位置。基于检测到的颜色,机器人臂移动到指定位置,释放物体并返回原始药水。
传感电路:
该电路可用于感测和区分不同的颜色。该电路展示了使用LDR的简单颜色传感器的原理和操作。该电路分为三个部分:检测器(LDR),比较器和输出。当特定颜色的光落在LDR上时,其电阻降低并产生输出电压。该电压取决于强度和波长
不同的颜色。因为需要根据要求设置比较器的参考电压。
例如,如果在正引脚设置参考电压为0.38伏,LDR对蓝光变得敏感。当蓝光落在LED上时,产生近似0.28V的输出电压,这使LED输出发光。
变压器:
通过适当地选择匝数比,变压器可以通过使Ns大于Np来“提高”交流电压,或者通过使Ns小于Np来“降低”交流电压。这里,230伏特的电源从市电如果转换为12-0-12V降压中心抽头变压器。这种交流电压需要转换成直流,以供控制器和直流电机使用。
变压器是通过电感耦合导体 - 变压器线圈将电能从一个电路转移到另一电路的静态设备。第一或初级绕组中的变化电流在变压器的芯中产生不同的磁通量,从而产生通过次级绕组的变化的磁场。该变化的磁场在次级绕组中引起不同的电动势(EMF)或“电压”。这种效果称为互感。
实验装置
输送系统
框架
标准重力输送机框架宽度为305mm,整体为460mm和610mm。输送机框架载于1.5米和3米长的长度。框架配有“丁丁板”(标准)或钩子和杆附件,以固定每个
段在一起。
标准框架以“锤子”的蓝色喷漆完成。可应要求提供其他颜色或饰面,例如,粉末涂层,镀锌光洁度或不锈钢。
辊
输送架的标准滚筒直径为50.8mm。它们有PVC(25公斤容量),黑钢和镀锌钢两种中负荷(140公斤容量)和重型责任(200公斤容量)版本,以适应不同的负载或条件。不锈钢滚筒冲洗或腐蚀应用。装有弹簧的车轴沿着车架开孔。适用于PVC和中等负荷
滚子一端是D形,而另一端是圆形。这样就可以很容易地更换损坏的滚筒。重型滚筒提供12毫米轴。机架可采用精密或不锈钢轴承。
支持
有两种类型的标准支持。这两种风格可从600 - 1000mm到“滚子顶部”调整。其他支持样式和完整帧用于特殊支持。RHS支撑件通过新月(笑脸)板用螺栓固定在输送机框架的下侧。此板提供任何角度未对准的津贴。
带式输送机
一种传送带方式是利用一个平带运行在一个扁平的预制钢甲板或轧辊上。它们适用于产品的平稳和安静的运输,并理想地适合不规则形状的产品,不能轻易地移动在其他输送方式。
除纸箱或提箱外,其他应用的例子是移动软袋或挎包、粉袋或面粉袋或生食品。这是一个优秀的输送带处理项目,可能有松散的绳子或磁带,否则会在其他输送带风格被抓住。
输送系统
图显示了输送系统的概述。

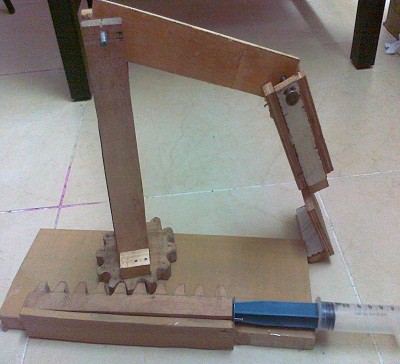
机器人手臂
从前部和侧面钻到基座8厘米中的孔,使得盘靠近一侧。这将使空间用于将其移动在另一侧的活塞。切割4厘米的定位并将其粘在底部。将磁盘滑入销钉上,将2.5厘米碎片粘在磁盘上。这样磁盘会旋转,但不会脱落。
支撑结构的右侧有两个螺丝眼;在里面的一个足够大的注射器管,从底部向上2.5厘米。外面的那个可以小一些,因为它里面只有一根电线,它就是这样。距离底部5厘米,距离背面0.5厘米(底部的长边为背面)。一个人可以在外面用一个大的,如果那是唯一的。把它们拧进去,然后把碎片粘到磁盘上,因为这样更容易(尤其是里面的一个)。在距离底部6厘米处切一块销子,以适应洞。它应该足够长到支撑结构的外边缘,所以结构正好是3.2厘米宽。长臂应该是3.2厘米宽,(测量你干燥的长臂),所以这里的空间必须在顶部的孔中插入钉子,使它们粘在1厘米内,这将保持长臂。它们不需要粘在一起,因为没有运动会让它们松动,能够把它们取下来让它干,然后继续到抓手臂。