表的内容
受电弓铣床的机构与运动学
摘要
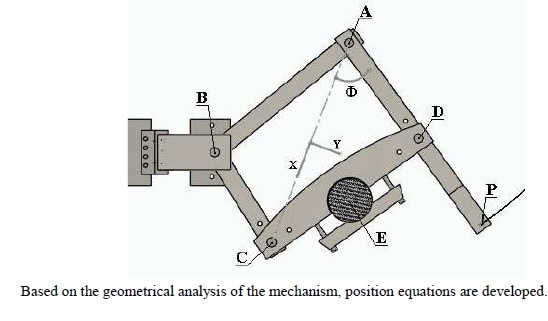
本文研究了一种2-转动1-转动(RRP)的机械臂的运动学问题。该机械手基于平行四边形连杆机构,并沿水平方向和z轴运动进行平移,即垂直运动由有效触针长度提供。在末端执行器上安装了一个装有铣刀的掌形铣刀。与传统的铣床相比,该铣床可以对手写笔穿过的未缩放的轮廓进行横切。正运动学方程已经表述出来。用solid works软件进行的模拟结果与本文推导的计算公式基本吻合。制作一个原型,用于在任何轮廓上进行铣削操作。受电弓铣床是很好的解释如下
介绍
传统的铣床只能在一个平面上或我们可以说只能沿着直线路径进行铣削,不能生成已经存在的物体的复制品。该机械手工作空间大,灵活度高,可操作性好;可广泛应用于喷漆、焊接、组装、木/金属雕刻等领域。然而,由于其悬臂式结构,机械手本质上不是很刚性,因此,连接组件到床身的环节是最容易由于弯曲载荷而失效的。在高速重载工况下,其动态性能较差。适用于轻负荷、低速作业
并联机构自20世纪60年代首次发明以来,已在许多工业领域得到应用。轻轨车辆(lrv)配备一个受电弓从接触线收集电流。当lrv运行时,受电弓盘头与导线接触,电被输送到车辆上
利用修正几何功的概念对受电弓机构和常规开链、闭链机械臂的机械效率进行了研究和评价。研究了六自由度受电弓式机械臂的运动学,介绍了简化其运动学的特殊机构。
对直角型和圆柱型受电弓机器人的计算复杂度进行了评估,并与PUMA型受电弓机器人进行了比较
受电弓机构用于设计和制造一种铣床,这种铣床可以在任何轮廓上移动,只要触笔在任何已经存在的物体上沿着相同的轮廓移动。使用这种机械手,我们可以生成对象的缩小复制或我们可以说它是一台复制机,可用于大规模生产与经济的生产/加工成本。该机械手的3-DOF增加了增加或减少雕刻深度的功能,可用于金属雕刻行业或木雕行业对雕刻的木雕图案进行复制。在末端执行器上,我们可以用焊枪或油漆刷来代替刀具
非常容易和准确地执行所需的典型操作。唯一的限制是它糟糕的动态性能,但我们的运动学分析表明,它是完美的轻和慢速度的操作。
作者:
Mahendra Verma, Abrar Ahmad, Niyazul S Haque, Sahil L Mallick, Ishank Mehta, R. K. Tyagi